

News
新闻动态基于EVA可编程的大可逆形变仿生驱动器论文发表于Polymer期刊
发布时间:2023-01-12 文章来源:李南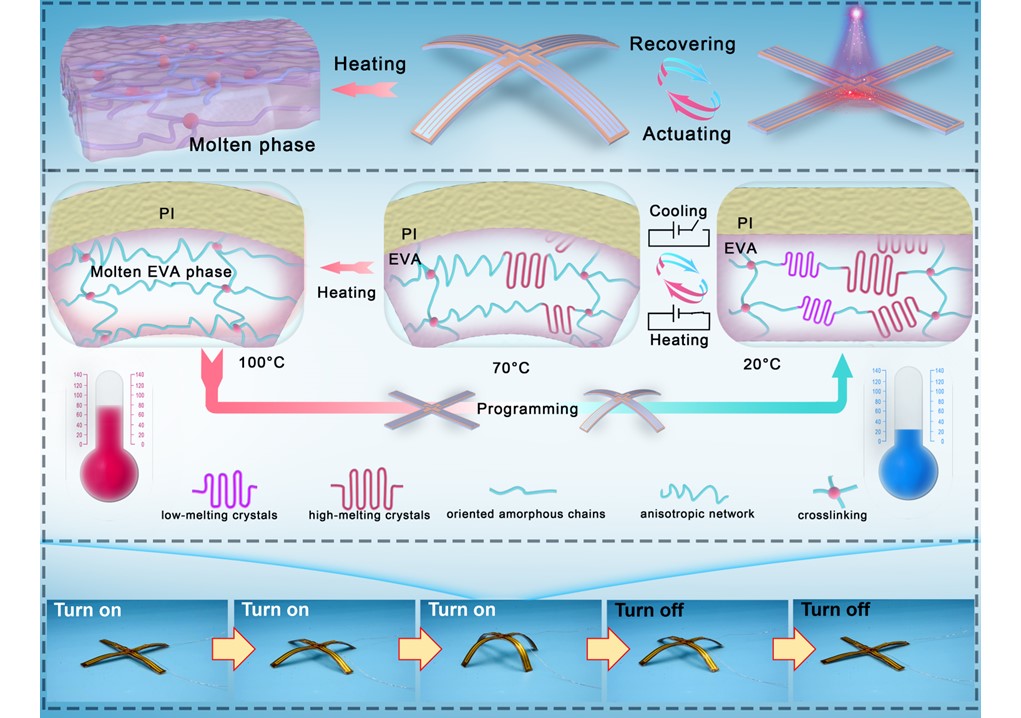
基于半晶聚合物的形状记忆聚合物(SMP)具有在施加电压下的可逆和远程驱动的特性,被用于开发柔性致动器,其中商用材料聚乙烯乙酸乙烯酯(EVA)由于其成本低和晶体可调的优点,在大规模应用中具有很大的潜力。然而,基于商业聚(乙烯-共醋酸乙烯酯)(EVA)(通常小于10%)类的SMP变形小,一直是限制其实际应用的问题。在此基础上,通过与聚酰亚胺(PI)复合丝网印刷Ag导电网络,将预拉伸光交联的EVA相结合,设计并制备了可逆变形大(~20%)的仿生驱动器。采用化学交联点作为新的骨架域,可以使骨架域的原晶体参与可逆驱动,从而获得较大的变形。同时,由于EVA中光交联形成的化学交联点,合成的复合材料可以在高于熔点的温度下驱动,这对降低驱动条件的约束至关重要。此外,Ag导电网络制备的良好导电性使该复合材料具有低电压(≤25 V/m)的致动能力。基于复合材料良好的编程能力,设计了含零定可逆驱动的多种模式。特别是四足机器人在施加5 V电压时可以快速站立,并在电压去除后恢复到零设置状态,证明了该复合材料在柔性机器人中的应用潜力。
Li Nan, Sun Wen-Jin, Wang Yue-Yi, Yan Ding-Xiang, Li Zhong-Ming, A programable biomimetic actuator with large and reversible deformation based on commercial poly (ethylene-co-vinyl acetate). Polymer, 2023, 265, 125591, DOI: 10.1016/j.polymer.2022.125591.

地址:四川省成都市一环路南一段24号四川大学高分子科学与工程学院
电话:86-028-85400211

 团队概况
团队概况 新闻动态
新闻动态 科研成果
科研成果 成果转化
成果转化 平台建设
平台建设 学术交流
学术交流 人才培养
人才培养 加入我们
加入我们